Problem Statement
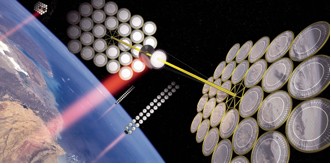
In April 2000, the National Science Foundation and the National Aeronautics and Space Administration held a joint workshop on autonomous construction and manufacturing for electrical power systems in space. In this workshop, participants explored harvesting solar power in space to help the world meet its future energy needs. This concept of Space Solar Power (SSP) involved placing a large solar collector panel or reflector panel in space and focusing a concentrated beam of energy on a panel on Earth that would be diverted to an energy plant for harvesting [4; Fig. 1].
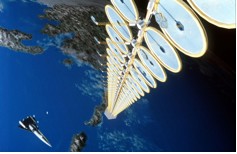
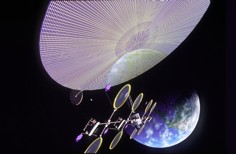
SSP has been recognized by Popular Science as one of the top 10 plans for clean, renewable power, stating that “space-based sun collectors could eventually meet all of our power needs” [7]. Recently, the Space Frontier Foundation sponsored a public online discussion on the topic [http://spacesolarpower.wordpress.com/]. Many satellite concepts have been proposed, including the Suntower and the SolarDisc [16; Fig. 2]. However, none of these monolithic architectures have tackled “the biggest technical challenge: launching the device into orbit” [7]. For a large solar reflector that is potentially numerous kilometers in size, the difficulties and high-cost of transporting the necessary components for its construction, as well as the actual construction of the reflector itself, remain challenges that researchers would need to address.
 |
 |
Purpose of the Project
One proposal that has received considerable attention is the use of robots for constructing a large solar panel. The original workshop report articulated one version of this solution in which the solar reflector is composed of a formation of many individual robotic units:
[The reflector is] actually created by having a swarm of coordinated independent semi-intelligent objects [(i.e., robots)] acting in concert. A solar reflector might be created in this way by having thousands of small free-flyers, each with a piece of mirror attached to themselves, fly into and then maintain a parabolic formation. One advantage of this strategy is that if the system is ever damaged, the swarm could reconfigure to eliminate the damaged elements but still maintain whatever level of uniformity might be required. [4]
This poses some interesting research questions. For example, once deployed, how does this large collection of robots communicate and coordinate their activities to form an organized parabolic structure resembling a reflector? How do the robots know when and where to move to maintain their position within the formation? And how can one operator or a small group of operators communicate with thousands of robots to effectively change the formation as needed? These questions have yet to be successfully addressed. Research in creating and maintaining organized formations of robots is a relatively new area of investigation, and implementation and testing has only been applied in simulation or on small groups of robots.
The need for algorithms for the control and interaction of robotic formations extends beyond that of SSP. For example, a large line formation could be implemented for the efficient planting and maintaining of uniform rows of crops. Coordinating large grid formations of robots has also been suggested for the “volumetric control” (surveying or monitoring) of some environment [25]. Additional applications include the autonomous navigation of various types of vehicles, ranging from automobiles to aircraft or watercraft. Recent applications for highway traffic control and safety are also being explored [9; Fig. 3].

